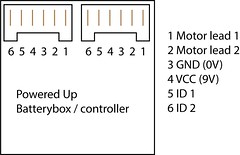
Bildquelle: https://www.eurobricks.com/forum/index.php?/forums/topic/162288-powered-up-a-tear-down/; Pin 4 ist 3.3V - nicht 9V!
Das System ist so konzipiert, dass sogenannte Hubs eine zentrale Rolle spielen. Sie können entweder eigenständig arbeiten oder über Bluetooth (meist BLE Bluetooth Low Energy) kontrolliert werden. Die meisten Hubs haben Powered Up Buchsen, an die Motoren und Sensoren angeschlossen werden können.
Die Hubs dieses Systems kombinieren im Vergleich zu Power Functions Empfänger und Batteriebox in einem Baustein. Es ist kein externer Empfänger mehr notwendig. Zur drahtlosen Steuerung des Hubs kann ein Handy oder eine Fernbedienung genutzt werden. Die Kompatibilität hängt von App und Hub ab. Zu dem BLE Protokoll existieren eine offizielle (nicht vollständige) Dokumentation und zahlreiche Implementierungen aus der Community. Einige Projekte aus der Community sind am Ende der Seite verlinkt.
Einige Duplo Züge und der Super Mario Hub nutzen das gleiche Bluetooth-Protokoll. Sie sind jedoch nicht offiziell mit der anderen Hardware kompatibel und haben keinen Powered Up Anschluss. Davon abgesehen strebt Lego an, "alles mit allem" kompatibel zu machen.
Die Hubs dieses Systems kombinieren im Vergleich zu Power Functions Empfänger und Batteriebox in einem Baustein. Es ist kein externer Empfänger mehr notwendig. Zur drahtlosen Steuerung des Hubs kann ein Handy oder eine Fernbedienung genutzt werden. Die Kompatibilität hängt von App und Hub ab. Zu dem BLE Protokoll existieren eine offizielle (nicht vollständige) Dokumentation und zahlreiche Implementierungen aus der Community. Einige Projekte aus der Community sind am Ende der Seite verlinkt.
Einige Duplo Züge und der Super Mario Hub nutzen das gleiche Bluetooth-Protokoll. Sie sind jedoch nicht offiziell mit der anderen Hardware kompatibel und haben keinen Powered Up Anschluss. Davon abgesehen strebt Lego an, "alles mit allem" kompatibel zu machen.
Es gibt neben den Hubs mit Bluetooth eine einfache eigenständige Batteriebox, die zwei Powered Up Anschlüsse hat.
Steuerung und Programmierung:
Um die Hubs der unterschiedlichen Themen anzusteuern gibt es die Powered Up App, die mit einem großen Teil der Hardware kompatibel ist und eine einfache Programmierumgebung bereitstellt. Man kann autonome Programme, die auch auf Sensoren zugreifen können, und ferngesteuerte Modelle bauen. Allerdings ist eine dauerhafte BLE-Verbindung zu einem Smartgerät erforderlich.
Mit Pybricks ist es darüber hinaus möglich, autonom Programme auf dem Hub zu speichern und auszuführen.
Die Robotik-Reihen LEGO Mindstorms Roboter Erfinder und LEGO Education SPIKE nutzen die gleichen Anschlüsse und sind mit der Hardware kompatibel. Sie werden mit jeweils einer eigenen App programmiert.
Anschluss:
Das Powered Up System verwendet eigene Anschlüsse mit 6 Adern. 2 werden zur Energiversorgung der Motoren genutzt (meist ungefähr 9V Batterie bzw. Akkuspannung; beim WeDo 2.0 Hub 5V), 2 zur Energieversorgung möglicher Schaltkreise in Sensoren (ca. 3.3V, in der Grafik falsch mit 9V angegeben) und zwei Pins dienen der Erkennung von angeschlossenen Geräten und einer möglichen Kommunikation mit diesen Geräten über TTL UART (Sensoren können ihre Messwerte darüber zurückgeben, Motoren mit Umdrehungssensoren die Umdrehungswerte).
Das UART Protokoll ist eine Weiterentwicklung vom Lego Mindstorms EV3-Sensorprotokoll. Eine offizielle Dokumentation dazu fehlt leider. Wenn man trotzdem einen Eindruck bekommen möchte, kann man in dem Dokument von Pybricks nachschauen. Einige Aspekte fehlen allerdings.
Anschluss:
Das Powered Up System verwendet eigene Anschlüsse mit 6 Adern. 2 werden zur Energiversorgung der Motoren genutzt (meist ungefähr 9V Batterie bzw. Akkuspannung; beim WeDo 2.0 Hub 5V), 2 zur Energieversorgung möglicher Schaltkreise in Sensoren (ca. 3.3V, in der Grafik falsch mit 9V angegeben) und zwei Pins dienen der Erkennung von angeschlossenen Geräten und einer möglichen Kommunikation mit diesen Geräten über TTL UART (Sensoren können ihre Messwerte darüber zurückgeben, Motoren mit Umdrehungssensoren die Umdrehungswerte).
Das UART Protokoll ist eine Weiterentwicklung vom Lego Mindstorms EV3-Sensorprotokoll. Eine offizielle Dokumentation dazu fehlt leider. Wenn man trotzdem einen Eindruck bekommen möchte, kann man in dem Dokument von Pybricks nachschauen. Einige Aspekte fehlen allerdings.
Geräteerkennung:
Die Hubs können erkennen, welches Gerät an den Powered Up Anschluss angeschlossen wurde. Bei "einfachen" Verbrauchern wie den Zugmotor, geschieht dies über eine Kombination von Kurzschlüssen und Widerständen an eigentlichen UART Pins 5 und 6. Geräte, die mit dem Hub kommunizieren können, werden über den UART-Handshake erkannt. Er enthält unter Anderem den Typ, die vom Sensor oder Motor unterstützten Modi und die maximale Verbindungsgeschwindigkeit. Nach dem Handshake wird die UART Verbindung auf die maximale Geschwindigkeit, die beide Geräte unterstützen, beschleunigt.
Das System hat folgenden Unterthemen:
Das System hat folgenden Unterthemen:
Folgende elektrische Elemente gibt es in dem System:
- Hubs und Batterieboxen (+ Duplo Zugbasis)
- Fernsteuerungen
- Sensoren
- Motoren
- Lichter
Steuerungsmöglichkeiten von der Community:
- BrickController 2 App für Fahrzeuge (Android, iOS)
- SBrick App für Fahrzeuge (Android, iOS)
- Brick Automation Project für Eisenbahnlayouts (Windows 10)
- Pybricks für autonome Programme (Chrome-basierende Browser)
Danke fürs erklären STEINeZEIT
AntwortenLöschen